Driverless car revolution.
In order to operate they utilize huge amount of data to recognize environment around.
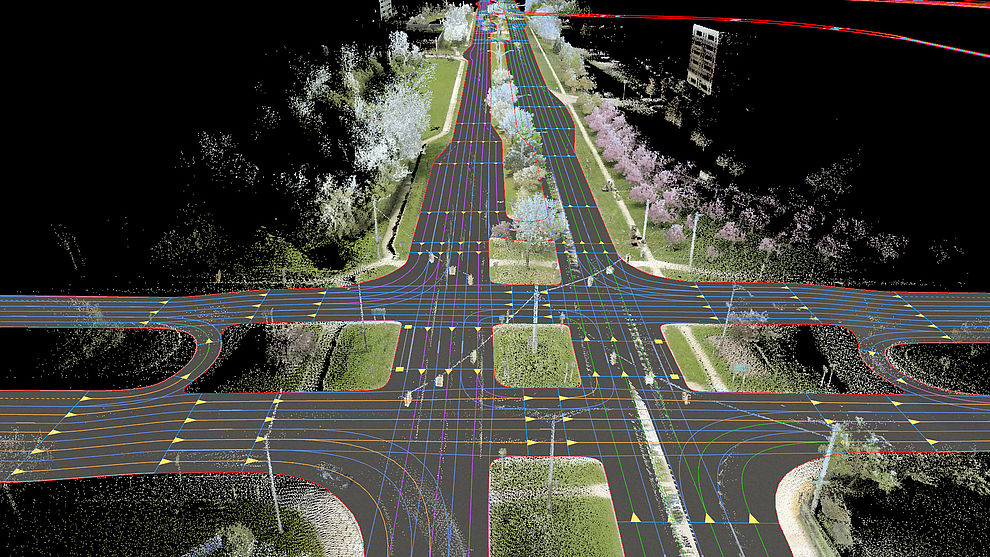
The most effective way to determine surroundings for Self-Driving cars are “primal” 3D road maps.
Such maps are being created by Google, HERE, TomTom and other corporations and their data are proprietary, built by LIDAR scanned road’s point clouds.
Rationale.
The problem is escalated by tech startup Pilot Automotive Labs https://angel.co/pilot-automotive-labs , building self-driving plugin for any car. Plugin should send and receive sensor data to and from cloud service, which is not available and existing vendors do not provide API to their autonomous driving maps.
Problem.
Precise road maps and their data are not available for open use in autonomous driving projects and therefore slowing down development of autonomous driving.
Solution.
During the hackathon we are going to create working prototype of cloud based service “Drivenet Maps”.
Alternative descriptions, naming: “Open Source 3D Map for autonomous driving”, “3D ADAS driving map”, “3D automated driving maps”, “Cloud-based dynamic maps”.
Real life use scenario.
- Self-driving cars stream real-time data from its sensors to Drivenet Maps. LIDAR data is network stream through 4G/LTE network;
- LIDAR’s Point cloud is added to existing 3D model improving quality of data;
- Drivenet Maps has an editor interface to add lane marks and other road infrastructure information;
- Road markings are edited by community approved editors (Wikipedia style) or central authority;
- Autonomous vehicle is planning its driving path from A to B address, based on precise location (RTK GPS) and Drivenet Maps road lane and directions information.
Stakeholders/beneficiaries.
Municipalities.
Road infrastructure companies.
Car producers.
ADAS Vendors
What we will have @ Hackathon.
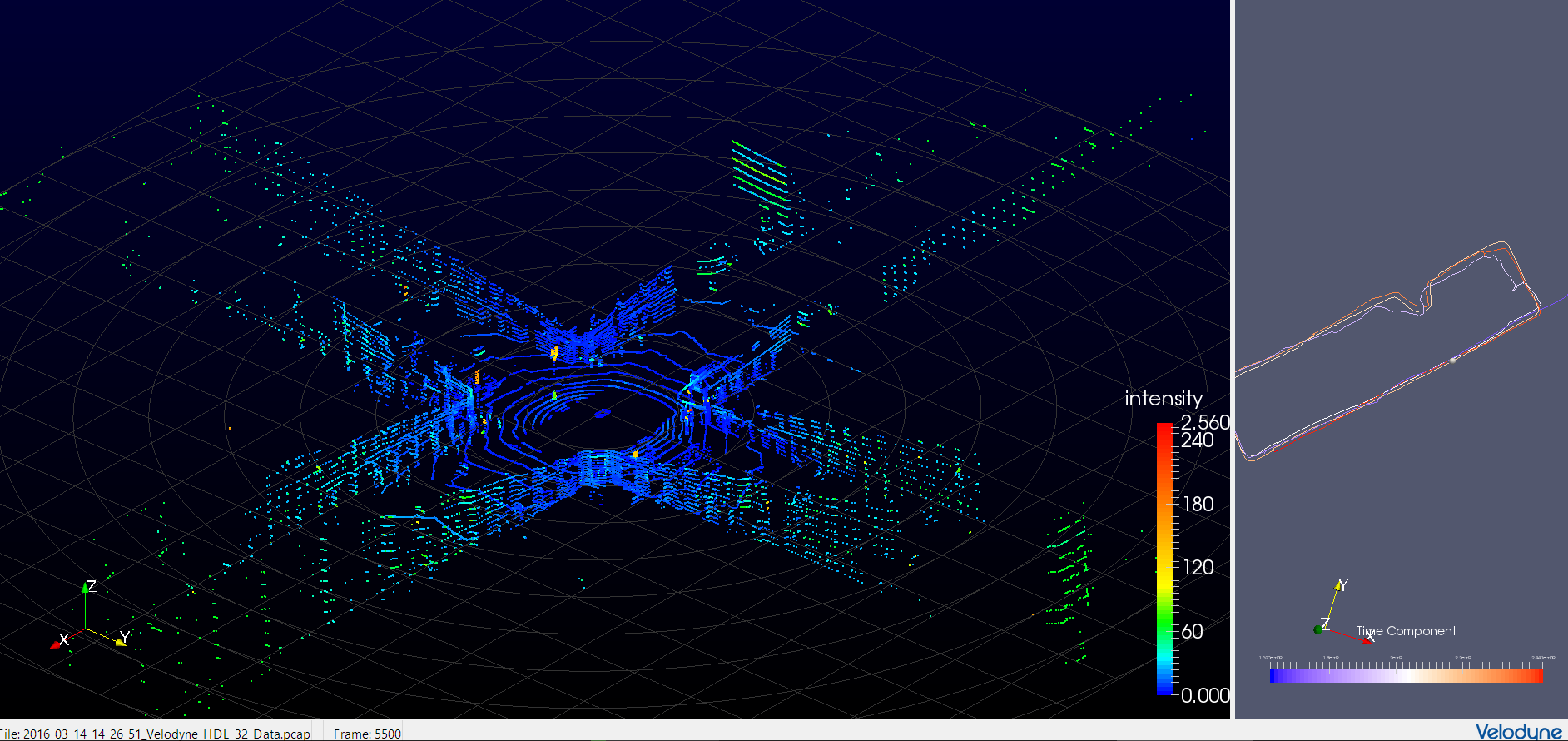
- Point clouds of Riga and Latvia roads scanned by Velodyne 32e LIDAR in .pcap file format;
- HD video image of streets and roads captured with Garmin VirbX. Video Data include timestamp, GPS, IMU, OBDII data from capturing vehicle in .fit file format.
- VPS (Windows, Ubuntu) and domain http://drivenet.pilotlab.co/
- Hardware high end desktop server with Nvidia GPU.
Technical solution to build during hackathon.
- To clone / build Tile map server. Based on OpenStreet maps (or similar): https://switch2osm.org/serving-tiles/manually-building-a-tile-server-14-04/
- To import point cloud from LIDAR data (.pcap);
- Manually add lane markings and show merged 3D map for autonomous driving.
Examples.
HERE maps: http://360.here.com/2015/07/20/here-introduces-hd-maps-for-highly-automated-vehicle-testing/
3D ADAS map: https://www.youtube.com/watch?v=yOEro_GChoM
Resources.
Tutorial: Experiments in Crowdsourcing Point Clouds For 3D Maps https://mapzen.com/blog/point-clouds
CloudCompare http://www.danielgm.net/cc/
PostGis http://postgis.net/
Project converting .pcap files to .ply files http://www.realearth.us/-instructions.html
Autoware project: https://github.com/CPFL/Autoware
Project iniciators.
PILOT Automotive Labs https://www.f6s.com/pilotautomotivelabs
EDI – Institute of Electronics and Computer Science (Riga, Latvia) http://www.edi.lv/en/home/
Contacts.
Rihards Gailums,
rihards.gailums@gmail.com
EDIT:
Image of raw point cloud and GPS:
Coverage of collected data:




Very interesting and challanging idea
I hope, this could also improve OTM data http://opentransportmap.info/